
0%
INITIALIZING_SYSTEM...
An autonomous mobility kernel designed to bridge the urban data gap. NavX repurposes advanced safety logic to navigate, map, and serve informal settlements and unmapped disaster zones.
Initialize System_
Standard navigation stacks optimize strictly for T_min (Velocity). In dense, informal, or disaster-struck environments, this leads to failure.
Current robots are blind to Inequality, Infrastructure Decay, and Human Safety. 1 Billion people live in "unmapped" zones where the "fastest path" is often the most dangerous.
NavX introduces Risk-Aware Path Scoring.
By prioritizing Safety > Velocity, NavX autonomously navigates complex urban terrain, detecting hazards
(debris, blocked paths) in real-time.
RESULT: A deployable Digital Twin generator for inclusive city planning.
Route transparency via explicit cost functions. Building trust between autonomous agents and vulnerable communities.
Automatic re-planning < 200ms upon detecting debris, crowds, or structural risks. Designed for unstructured roads.
Seamless integration with City Digital Twins. Functions as a decentralized edge node for municipal data collection.
Real-time readout: "−18% Velocity, +40% Safety". Quantifiable trade-offs for emergency logistics.
C = (w_t × Time) + (w_r × Resilience) + (w_i × Inclusivity)
| MODE | T_Weight | R_Weight | I_Weight | DESCRIPTION |
|---|---|---|---|---|
| RESPONSE | 1.0 | 0.2 | 0.1 | *Formerly Velocity.* Emergency Mode. High speed for rapid intervention/First Responders. |
| RESILIENCE | 0.5 | 1.0 | 0.3 | *Formerly Security.* Disaster Mode. Max obstacle clearance. Navigates debris & unmapped terrain. |
| INCLUSIVE | 0.4 | 0.3 | 0.8 | *Formerly Comfort.* Accessibility Mode. Smooth motion for transporting fragile aid or guiding elderly. |
YOLOv8 VISION CORE // REAL-TIME INFERENCE
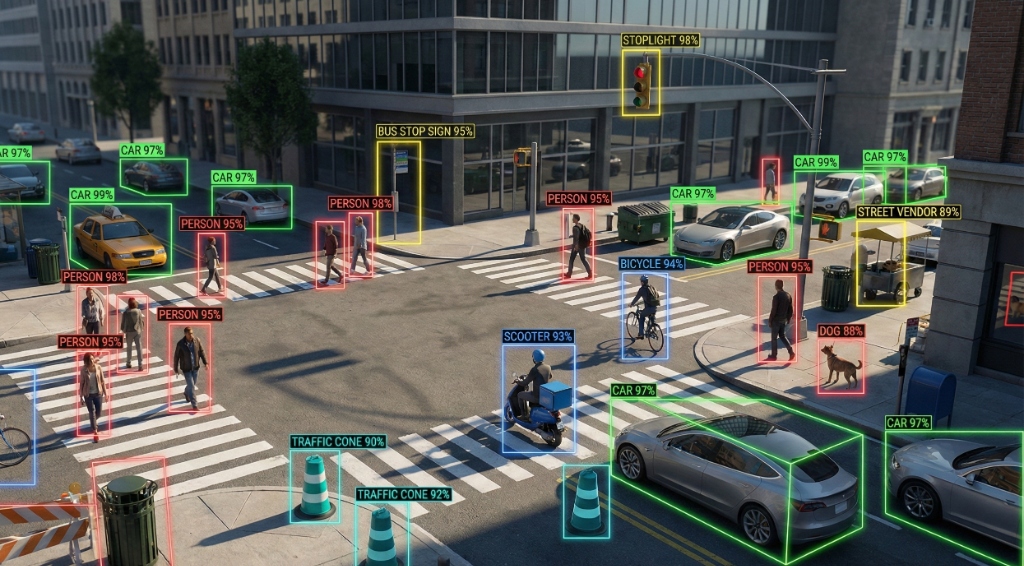

Monocular depth approximation using bounding box regression constraints. Calibrated for urban canyon environments.
Risk = Σ (Confidence × ClassWeight × DistanceFactor)
Distributed nodes. Modular design. Fail-safe.
Python A* implementation. Matrix evaluation.
Sensor fusion aggregation point.
Nav2 interface and action management.
HARDWARE & SOFTWARE INFRASTRUCTURE
Razer Kiyo Pro
TurtleBot3 Burger
Raspberry Pi 4 (4GB)
YOLOv8n (Nano)
60FPS Inference
Hazard Scoring Engine
ROS 2 Humble
Nav2 Stack
Python 3.10
React.js v18
TailwindCSS
FastAPI / WebSocket
REAL-TIME METRICS & LATENCY ANALYSIS
Select a routing profile to observe real-time solver behavior.
Concept enclosure for a compact, solar-ready rover designed to patrol informal settlements.
MISSION: Generate 3D Digital Twins of slums to enable municipal upgrading and disaster response without
displacing residents.


Project Visionary. Orchestrating the strategic pivot from autonomous luxury to humanitarian technology.

Lead Architect. Designing low-cost, edge-compute navigation stacks for the Global South.

System Integrator. Optimizing low-level drivers and sensor fusion for robust hardware performance.

AI Specialist. Developing efficient vision models for real-time hazard detection in complex environments.